- Shopping, made easy.
- /
- Get the app!
Processor:
32 bit 2M flash memory STM32F427 Cortex M4, with hardware floating point
frequency: 168MHZ, 256K RAM
32 STM32F103 backup coprocessor
Real time operation system
Features:
14 PWM/ Servo Output
Bus interface(UART,I2C,SPI,CAN)
Intergrated back up power and lose efficacy controller, main controller lose
Efficacy can safely alter to back up control
Providing automatic and manual mode
Providing redundant power supply input and failover
Multicolor LED light
Providing multi sound buzzer interface
Micro SD records flying data
Sensor:
L3GD20:3 axis digital 16 bit gyroscope
LSM303D:3 axis 14 acceleration/magnetometer
MPU6000:6 axis acceleration/magnetometer
MS5611:precision barometer
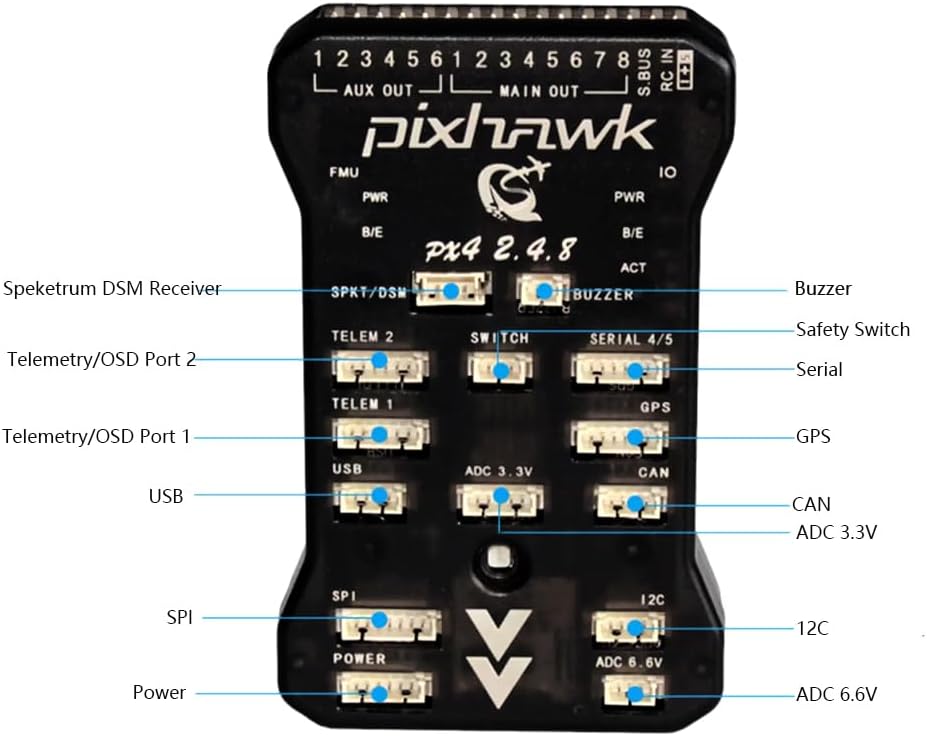
Interface:
14 PWM servo or ESC outputs
25 UART, one compatible high voltage, two have hardware flow control
Two CAN
Spektrum DSM/ DSM2/ DSM-X satellite receiver compatible input
Futaba SBUS compatible input and output
PPM signal input
RSSI(PWM or voltage) output
I2C and SPI
3.3 and 6.6VADC input
External MICRO USB interface
Package Included:
1 x Pixhawk 2.4.8 32bit Flight Controller
1 x Original Shell
1 x Safety Button
1 x Buzzer
1 x 4G TF Card(IO firmware has written)
1 x Pixhawk I2C Splitter Expand Module
1 x PPM Decoder
1 x Data Cable
 USB KVM Switch Adapter Controller,2 Computers Sharing Printer,Without Drivers,Come with Desktop Controller and 2 Pack USB Printer Cables
SAR 105
USB KVM Switch Adapter Controller,2 Computers Sharing Printer,Without Drivers,Come with Desktop Controller and 2 Pack USB Printer Cables
SAR 105
 2.4G 3CH Remote Control Radio Transmitter with Receiver for 1/10 1/8 RC Car RC Boat
SAR 183
2.4G 3CH Remote Control Radio Transmitter with Receiver for 1/10 1/8 RC Car RC Boat
SAR 183
 Corona C4SF 2.4G Receiver 4CH Plashproof S-FHSS HV Receiver Compatible with Futaba SBUS 3PV 4PLS 4PV 4PX 7PX etc.
SAR 136
Corona C4SF 2.4G Receiver 4CH Plashproof S-FHSS HV Receiver Compatible with Futaba SBUS 3PV 4PLS 4PV 4PX 7PX etc.
SAR 136
 FS-2A Receiver 4CH AFHDS 2A Mini RC Receiver PWM Output Compatible with Flysky i6 i6X i6S RC Transmitter
SAR 73
FS-2A Receiver 4CH AFHDS 2A Mini RC Receiver PWM Output Compatible with Flysky i6 i6X i6S RC Transmitter
SAR 73