- Shopping, made easy.
- /
- Get the app!
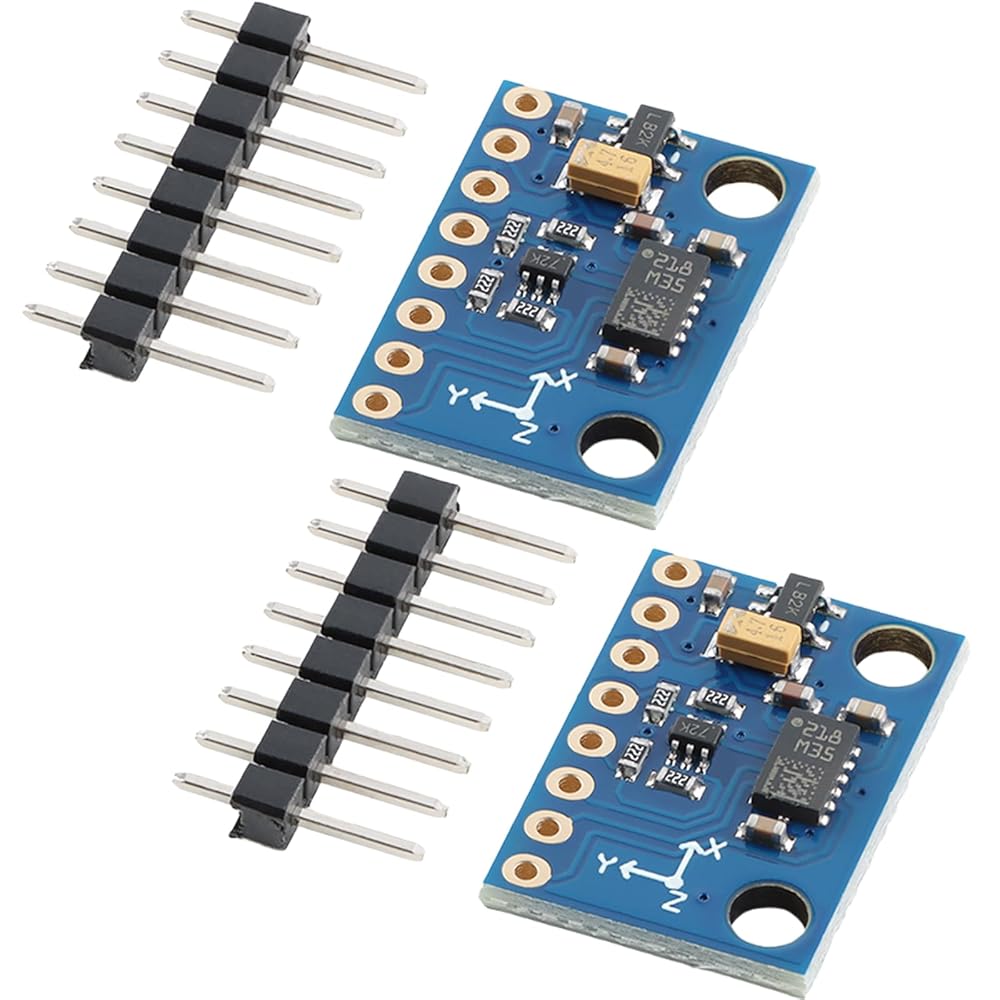
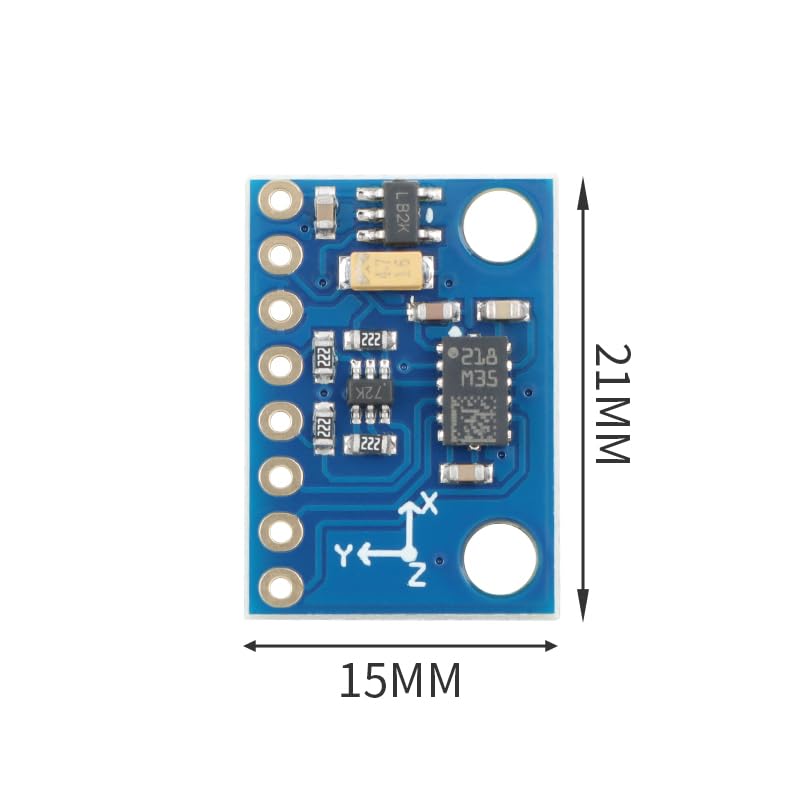
product parameters
working voltage :2.5V-5.5V DC (compatible with 3.3V/5V system, onboard level conversion)
accelerometer range of :± 2g, ± 4g, ± 8g, ± 16g (programmable configuration)
magnetometer range :± 1.3-± 8.1 gauss (automatic range adjustment)
for data output:
Acceleration: three-axis 16-bit digital signal
Magnetic force: three-axis 12-bit digital signal
Attitude : Built -in of inclination compensation algorithm, direct output heading angle
Communication Interface: I²C (dual address: accelerometer 0x 19, magnetometer 0x1E)
Power consumption:
Operating mode: 0.9 mA (accelerometer + magnetometer)
Standby mode: 1mA
Accuracy:
Acceleration: ± 1% FSR (full range)
Heading angle: ± 2 ° (after static calibration)
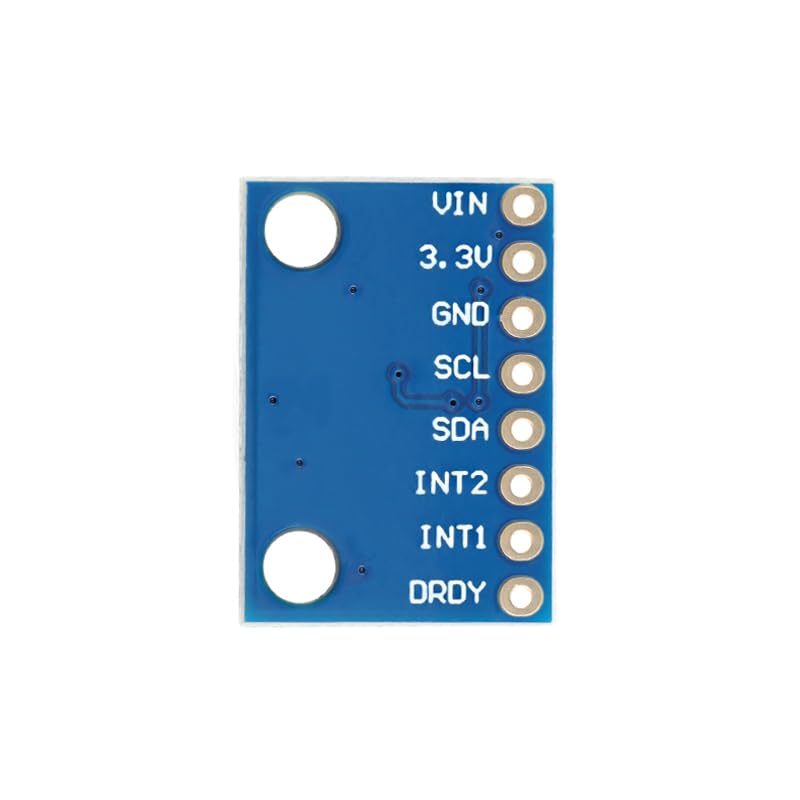
product pin function
VCC: power positive input (2.5V-5.5V DC)
GND: power supply and logic ground (common ground with controller)
SCL :I²C clock line (external 4.7kΩ pull-up resistor required)
SDA :I²C data line (external 4.7kΩ pull-up resistor required)
DRDY: Data Ready Interrupt (Active Low, Configurable Trigger)
INT1/INT2: Accelerometer interrupt output (for free fall/motion detection)
SA0: Address Selection (Magnetometer Address):
Ground: Address 0x1E (default)
Connected to VCC: Address 0x1D (used when multiple modules are connected in parallel)

 10 Sets RT Split Ultrasonic Transceiver Sensor Probe 10 Transmitters + 10 Receivers T+R Ultrasonic Sensor Set 20Pcs Probe Diameter 16mm for Motion Detectionn TCT40-16R/T
SAR 47
10 Sets RT Split Ultrasonic Transceiver Sensor Probe 10 Transmitters + 10 Receivers T+R Ultrasonic Sensor Set 20Pcs Probe Diameter 16mm for Motion Detectionn TCT40-16R/T
SAR 47
 -40%
MAX6675 Type K Thermocouple Temperature Sensor Module for Arduino, Accurate Temperature Measurement 3.0-5.5V
SAR 32
-40%
MAX6675 Type K Thermocouple Temperature Sensor Module for Arduino, Accurate Temperature Measurement 3.0-5.5V
SAR 32
 SPH0645LM4H I2S MEMS Microphone Breakout Board for Arduino Raspberry Pi, 1.6-3.6V Digital Sound Sensor for DIY Audio Projects
SAR 53
SPH0645LM4H I2S MEMS Microphone Breakout Board for Arduino Raspberry Pi, 1.6-3.6V Digital Sound Sensor for DIY Audio Projects
SAR 53
 10Pcs IRF520 MOSFET Driver Module MOS Field-Effect Transistor Driver Module Triode for Arduino MCU ARM Raspberry PI
SAR 47
10Pcs IRF520 MOSFET Driver Module MOS Field-Effect Transistor Driver Module Triode for Arduino MCU ARM Raspberry PI
SAR 47