- Shopping, made easy.
- /
- Get the app!
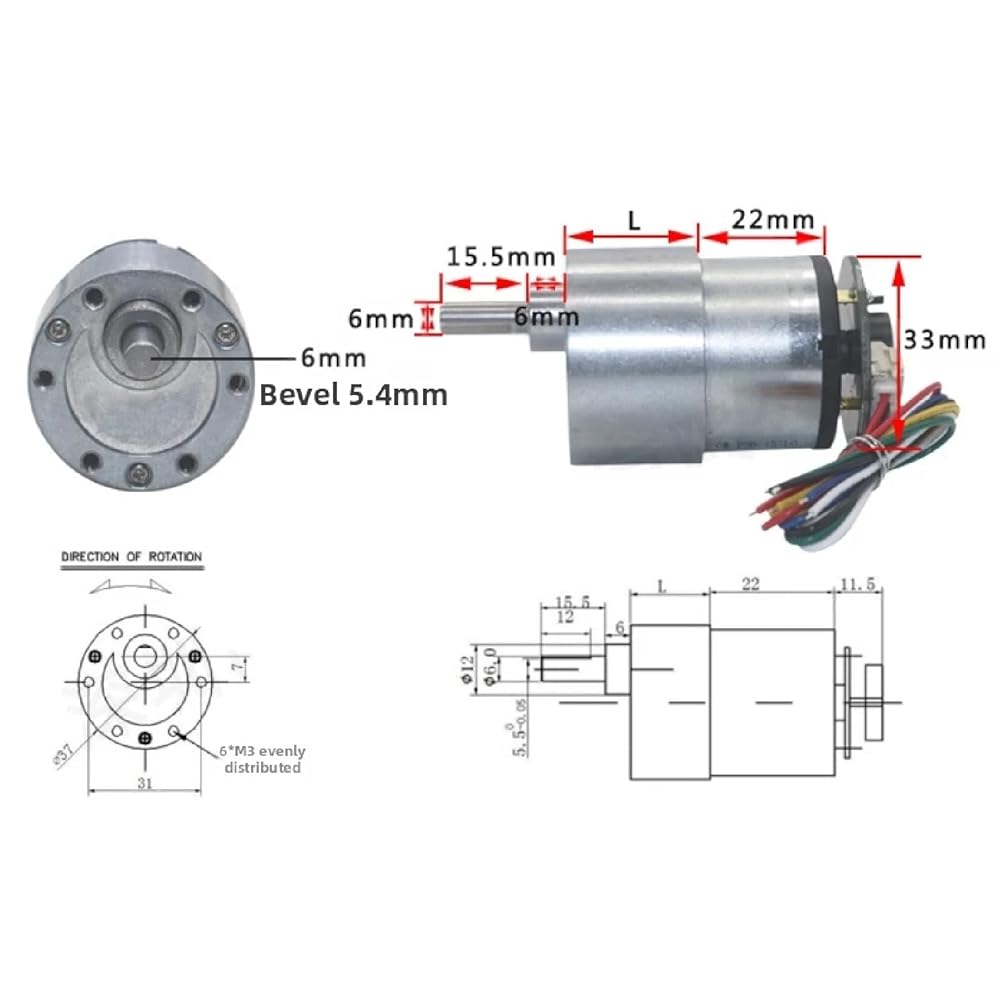
The JGB37-520 DC gear motor combines high torque output with precise control capabilities, making it ideal for demanding small machinery applications. Its integrated rotary encoder enables accurate speed control, while the adjustable rotation direction provides flexibility for various project requirements. The robust metal gearbox ensures reliable power transmission and long-term durability under continuous operation. This compact motor features an efficient gear reduction system that delivers substantial torque in a space-saving design. The color-coded wiring harness simplifies installation and connection to control systems. Perfect for robotics, automated equipment, and custom mechanical projects where consistent performance and reliable operation are essential. The motor's versatile design allows for straightforward integration into new builds or replacement applications. Its solid construction and precision engineering make it suitable for both hobbyist projects and professional industrial applications where precise motion control is required.
 Electric Solenoid Valve 1/4" 3/8" 1/2" 3/4" 1" Normally Closed Pneumatic for Water Oil Air DN40 DC24V
SAR 2,076
Electric Solenoid Valve 1/4" 3/8" 1/2" 3/4" 1" Normally Closed Pneumatic for Water Oil Air DN40 DC24V
SAR 2,076
 JGA25-370 Geared Motor DC Motor Electric Gear Motor high Torque Mounting Bracket 30RPM 12V
SAR 263
JGA25-370 Geared Motor DC Motor Electric Gear Motor high Torque Mounting Bracket 30RPM 12V
SAR 263
 KCD1 Rocker Switch, Black, 6A 250VAC/10A 125VAC, ON-Off-ON, LED Indicator Light, Marine Car Boat Compatible (Red 3 Pin)
SAR 218
KCD1 Rocker Switch, Black, 6A 250VAC/10A 125VAC, ON-Off-ON, LED Indicator Light, Marine Car Boat Compatible (Red 3 Pin)
SAR 218
 Miniature Coil Generalel ectromagnetic Intermediate Relay Switch with Base LED MY2NJ/3NJ/3NJ HH52P AC110V
SAR 236
Miniature Coil Generalel ectromagnetic Intermediate Relay Switch with Base LED MY2NJ/3NJ/3NJ HH52P AC110V
SAR 236