- التسوق ، اصبح سهلا.
- /
- احصل على التطبيق!
NxtPX4v2 — Research-Grade Open-Source Flight Controller Stack
The NxtPX4v2 is an open-source hardware designed and maintained by HKUST Aerial Robotics Group and produced by MicoAir Tech. The NxtPX4v2 flight controller has been officially merged into the PX4 mainline under the board target name "hkust_nxt-dual". You can find all open-source resources related to this flight controller on the HKUST Aerial Robotics Group GitHub, including hardware designs, firmware, tutorials, and reproducible research cases that other developers and researchers can reference.
Default firmware: PX4. ArduPilot can also be flashed by users.
Key features:
Research-focused, Open Hardware — Designed and maintained by HKUST Aerial Robotics Group for lab research, teaching, and algorithm validation.
High-quality IMU data for VIO & perception — Dual BMI088 high-precision IMUs deliver superior data for Visual-Inertial Odometry (VIO) and perception algorithms.
Extensive expansion & compatibility — 7x UART, 8x PWM, I2C, SPI and more enable easy integration with GPS, optical flow, O3 transmission, Raspberry Pi onboard computers, LiDAR, 3D cameras, and other research peripherals.
Compact & lightweight — Standard 20×20 mm mounting holes, small footprint and low weight for micro UAV platforms and experimental rigs.
Optional integrated ESC — Bluejay 4-in-1 ESC variant provides a compact, high-response power solution for small platforms.
Specifications (Flight Controller)
MCU: STM32H743VIH6, 480 MHz, 2 MB Flash
IMU: BMI088 + BMI088 (Dual)
Barometer: SPL06
Storage: MicroSD card slot
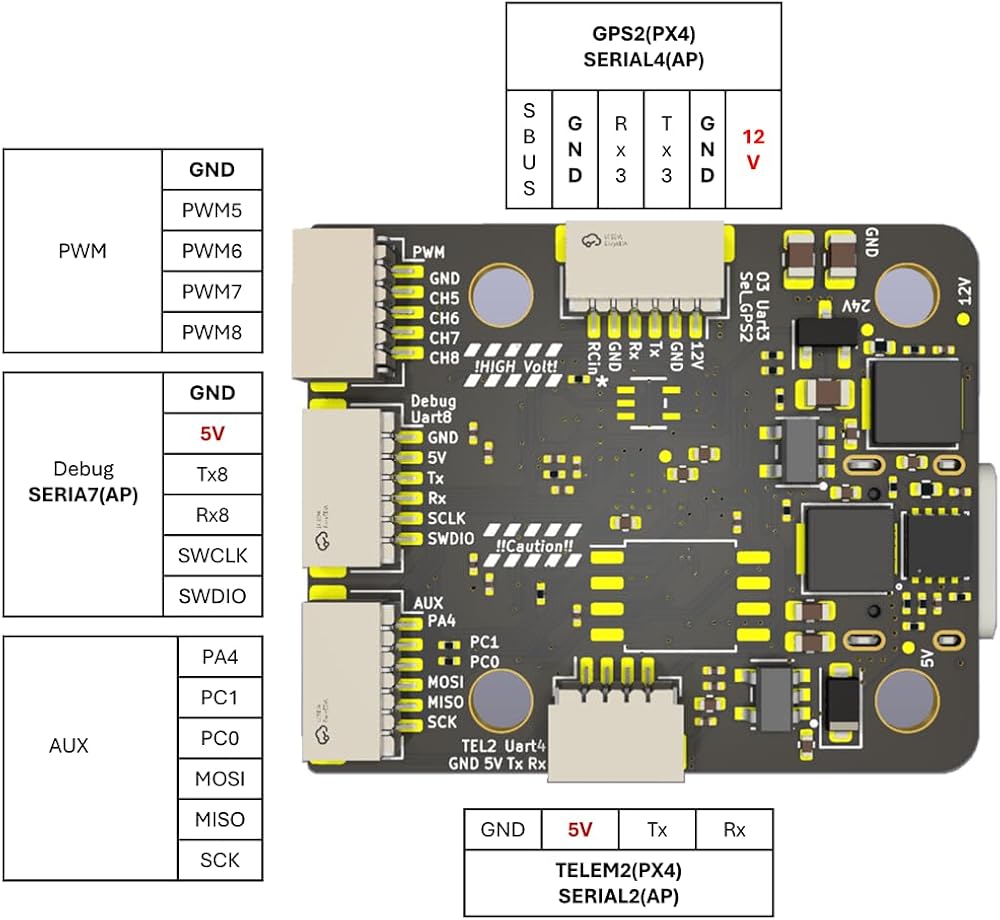
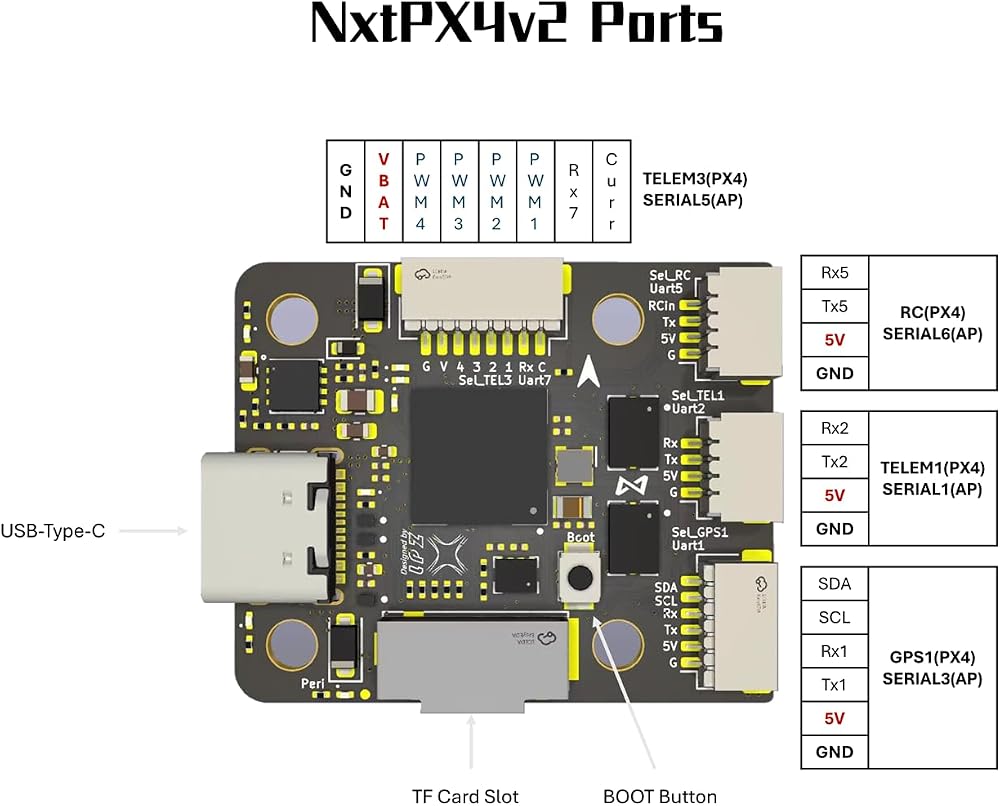
UART: 7 × UART
PWM outputs: 8 × PWM (channels 1–8 support DShot)
I/O: 1 × I2C, 1 × SPI, 1 × SWD, 2 × ADC (VBAT, Current)
USB: USB Type-C
BEC outputs: 5V @ 2.5A (controller, receiver, GPS, optical flow, etc.) and 12V @ 2.5A (VTx, camera)
Mounting: 20 × 20 mm, Φ3 mm
Dimensions: 27 × 32 × 8 mm
Weight: 6.5 g
3D model: STP file available for mechanical integration
UART mapping — ArduPilot
SERIAL0 → USB
SERIAL1 → UART2
SERIAL2 → UART4
SERIAL3 → UART1 (GPS)
SERIAL4 → UART3 (DJI-O3)
SERIAL5 → UART7 (ESC Telemetry)
SERIAL6 → UART5 (RCIN)
SERIAL7 → UART8
UART mapping — PX4
TELEM1 → UART2
TELEM2 → UART4
TELEM3 → UART7 (ESC Telemetry)
SERIAL4 → UART8
GPS1 → UART1
GPS2 → UART3
Radio Controller → UART5 (RCIN)
RC Input
The default RC input port supports SBUS and CRSF protocols.
For ArduPilot set SERIAL6_PROTOCOL=23, or set RC_INPUT_PROTO = Auto on PX4.
VTX Support
The SH1.0-6P connector supports a DJI O3 Air Unit connection.
Pin 1 of the connector is 12V — do not connect this pin to peripherals that require 5V.
PWM Output
The NxtPX4v2 supports up to 8 PWM outputs. Channels 1–8 support DShot protocols.
Battery Monitoring
On-board internal voltage sensing is provided.
Connections on the ESC connector support an external current sensor input.
Compass
The NxtPX4v2 does not include a built-in compass.
An external compass can be attached via I2C (SDA/SCL).
Note: This hardware is intended for researchers and developers building small UAV platforms, visual-inertial systems, and perception research. For tutorials, example projects and reproducible research based on this hardware, please refer to the HKUST Aerial Robotics Group GitHub.
Bluejay 4-in-1 ESC (Optional Stack)
Firmware: Bluejay_0.19.2_JH40
PWM Frequency: 48 kHz
ESC Protocol: DShot300 / DShot600
Power Input: 2–6S LiPo
Continuous Current: 33 A × 4 channels
MOSFET RDS(on): 1.2 mΩ
Current Sensor Output: 12.75 mV/A
Mounting: 20 × 20 mm (Φ3 mm)
Dimensions: 29 × 31 × 5.3 mm
Weight: 5 g
Final reminder: Default firmware is PX4; ArduPilot can be flashed by end users. For additional examples, hardware files, firmware and tutorials, visit the HKUST Aerial Robotics Group GitHub repository.
 XINANEE 5.8 جيجا هرتز هوائي Yagi النحاسي موسع نطاق الإشارة لـ DJI RC 2 & DJI RC Pro Controller (DJI Air 3 Mavic 3 Classic Pro Cine Controller)
SAR 100
XINANEE 5.8 جيجا هرتز هوائي Yagi النحاسي موسع نطاق الإشارة لـ DJI RC 2 & DJI RC Pro Controller (DJI Air 3 Mavic 3 Classic Pro Cine Controller)
SAR 100
 حامل عرض طائرة بدون طيار RC ثابت من CAPART لطائرات بدون طيار من سلسلة DJI Mini، قاعدة عرض سطح المكتب لـ DJI Mini 3 Mini 3 Pro Mini 2 Mini 2 SE Mini SE Mavic Mini
SAR 94
حامل عرض طائرة بدون طيار RC ثابت من CAPART لطائرات بدون طيار من سلسلة DJI Mini، قاعدة عرض سطح المكتب لـ DJI Mini 3 Mini 3 Pro Mini 2 Mini 2 SE Mini SE Mavic Mini
SAR 94
 غطاء حماية من السيليكون XINANEE لجهاز التحكم عن بعد DJI RC-N1، واقي وحدة التحكم DJI Mini 2 Mini 3 Mini 3 Pro Mavic 3 Air 2S (غطاء RC-N1 رمادي)
SAR 79
غطاء حماية من السيليكون XINANEE لجهاز التحكم عن بعد DJI RC-N1، واقي وحدة التحكم DJI Mini 2 Mini 3 Mini 3 Pro Mavic 3 Air 2S (غطاء RC-N1 رمادي)
SAR 79
 -5%
استبدال محرك الذراع الأمامي الأيمن لـ DJI Air 3 Drone Arm Shell غطاء الذراع مجموعة المحرك استبدال أجزاء إصلاح لملحقات DJI Air 3
SAR 443
-5%
استبدال محرك الذراع الأمامي الأيمن لـ DJI Air 3 Drone Arm Shell غطاء الذراع مجموعة المحرك استبدال أجزاء إصلاح لملحقات DJI Air 3
SAR 443